

Applications

industry classification

城市街景数据采集整体解决方案

概述
目前,导航与定位服务在人们的生活中已经占据了举足轻重的地位,在给人们日常出行带来各种便利的同时,其与实体经济不断融合,带动了传统产业结构调整和经济增长方式的转变。互联网地图服务除了提供地理信息等传统服务之外,已经创生出多种新型增值服务。随着卫星定位技术、遥感技术、地理信息系统技术和网络通信技术的发展,互联网地图应用更加丰富、服务更加完善,与商业模式的结合也更加清晰,市场规模快速扩大。城市街景地图作为一类三维实景地图,已成为互联网地图产业的一个新发展方向,其内容更加丰富,可显示所选城市街道的360度全景图像,且拍摄的景观并不仅限于城市街道,也涉及到景区风光以及室内景观、商场、饭店、博物馆等等。因而在提供基于位置的信息服务,与各类实体经济相融合方面有着更加得天独厚的优势。
街景地图的制作关键环节之一是实景素材采集,其所需的关键设备是专业探测器及载荷平台。街景地图是通过探测器拍摄实景素材,同时由载荷平台测量记录拍摄点的精确位置、载荷当前指向等信息,后期由软件对实景素材进行合成并与地理坐标匹配,生产出360度街景地图。在街景地图采集过程中,载荷平台除记录外方位信息外,同时还为载荷隔离载体运动,确保载荷视轴稳定,获得高质量的实景素材。
针对街景地图采集过程中定位、定向、测姿、稳定等需求,公司自主研制了街景采集定位定向测姿系统,可有效解决外方位元素获取、记录及载荷视轴稳定等关键问题,同时还打破GPS在街景采集领域中的垄断,与载荷供应商一起,实现街景采集系统国产化。
系统组成
城市街景采集系统主要由作业车、北斗差分基站、移动街景采集系统及后处理软件等组成。
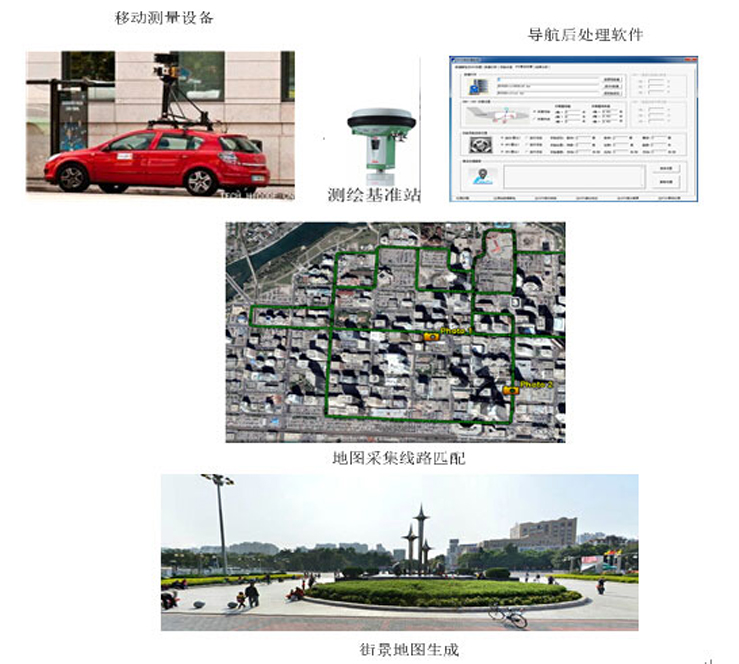
1. 北斗差分基站:广播高精度的差分修正信息,通过无线网络传至移动地图采集系统,使北斗的定位精度提高到2cm内,完全可以地图采集和匹配的需求。
2. 移动采集系统:包含北斗导航接收机、高精度惯性测量单元、360°全景相机等设备,通过北斗卫星导航同高精度惯性导航进行组合,可以最大限度的提高导航定位定向精度,同时通过惯性测量的引入还可以解决卫星信号遮挡和多路径情况对导航精度的严重影响。360°全景相机主要用于地图采集,通过多相机联合拍摄及拼接,实现360°全向地图的获取。
3. 高精度导航后处理软件:主要用于对卫星导航和惯性导航数据进行融合处理,利用前后向最优滤波和全局最优平滑等技术,解决卫星信号遮挡和多路径情况对卫星定位精度的严重影响,并极大的提高事后处理的定位定向精度,从而满足街景地图的合成与匹配需求,因而基于北斗导航和惯性导航数据融合的事后处理技术对于提高导航精度非常关键。